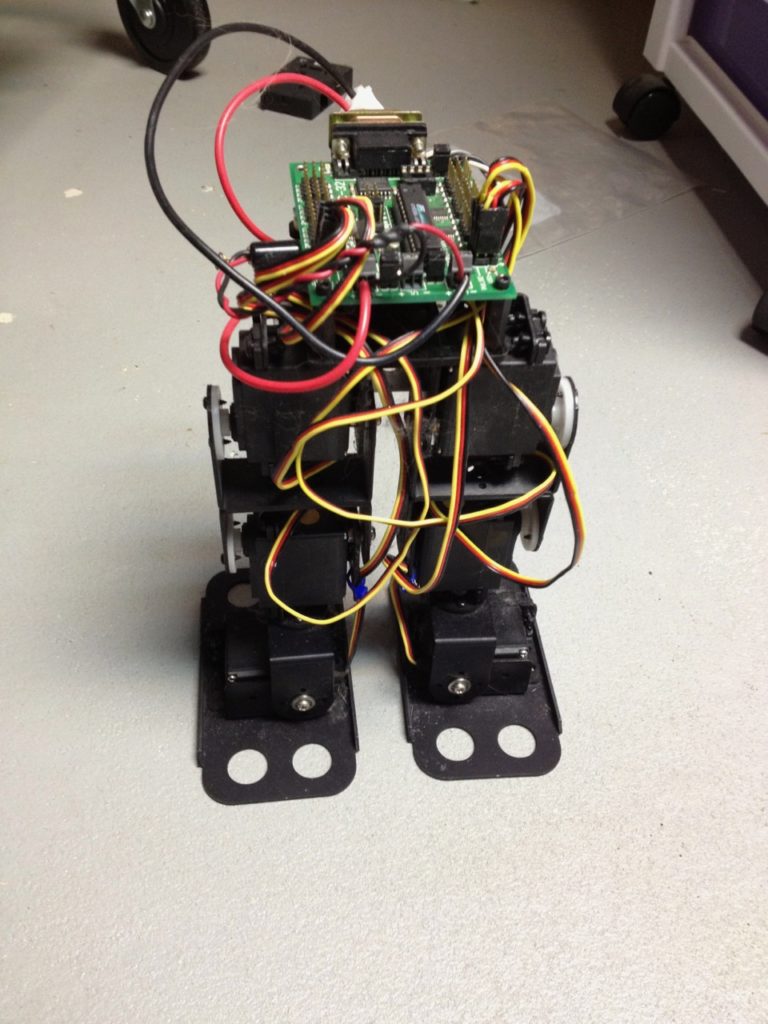
Walker
This was based on some designs on the Lynxmotion web site. I used a wireless device to connect to a Mac in the workshop. Never quite went to far with this other than getting it to walk.
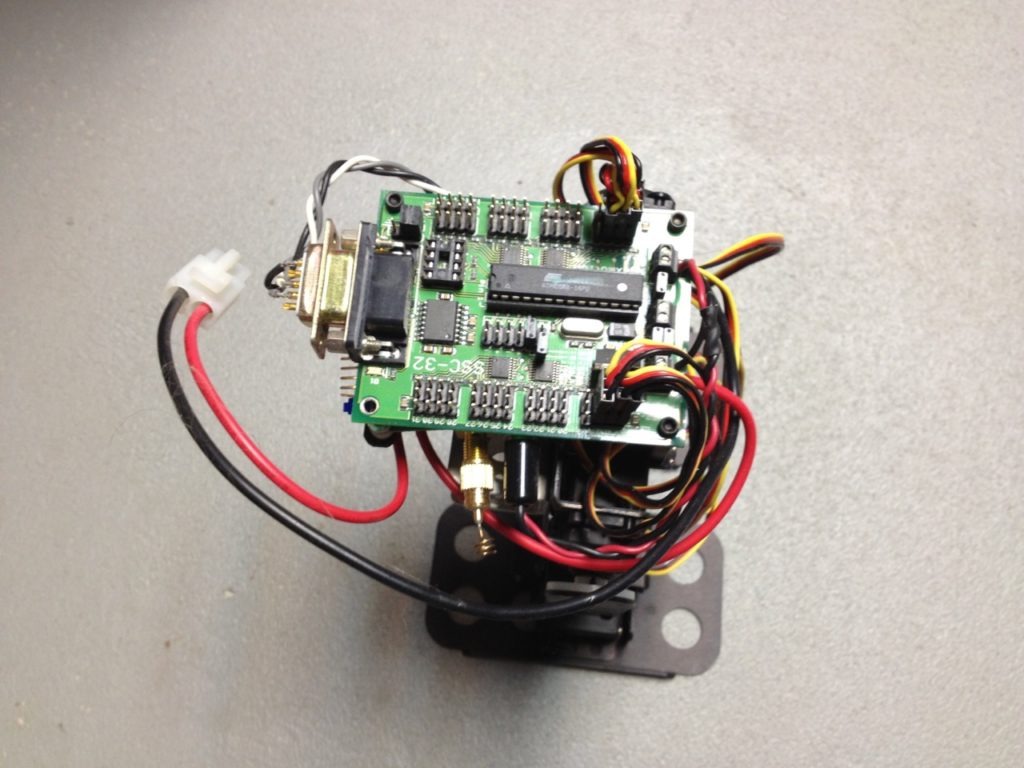
Just a simple ATMEGA328 based controller. I was working with Renesys to build a higher performance controller board based on the M16 processor but eventually gave up in favor of other projects. My goal was to have an RTOS to divide up the jobs of balancing and walking without one big pile of spaghetti code.
For now, this robot just sits on a shelf and gathers dust.